

CARINAnav – smart laser control
The CARINAnav system required for steering the laser system consists of the laser control software and hardware aligned with it, such as a tablet or desktop PC. Various data interfaces like LAP file format or DICOM Standard are available for transmitting coordinates. Customers using the SIEMENS syngo.via RT Image Suite have the option of controlling the lasers directly from the imaging software. Find out more about CARINAnav here.

Technical data
| Dimensions | Depending on mounting version, please consult our data sheets |
|---|---|
| Laser color (typical wave length) | red (638 nm) |
| Laser class | 2 |
| Laser adjustment | manually |
| Line width up to 4 m distance | < 1 mm |
| Line length at 3 m distance | > 3 m |
| Positioning accuracy | +/- 0.1 mm |
| Projection precision | +/- 0.5 mm at a projection distance of 4 m |
| Travel range | 700 mm |
| Travel speed | up to 200 mm/s |
| Power supply | 100-240 V AC, 50-60 Hz |
| Scope of delivery | Laser system, CARINAnav laser control, Wilke phantom, cable set |
Choose your optimal combination of lasers for patient marking at CT and PET-CT
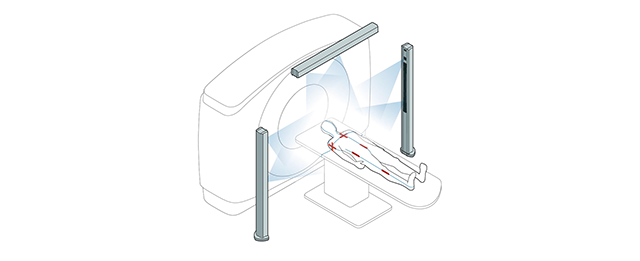
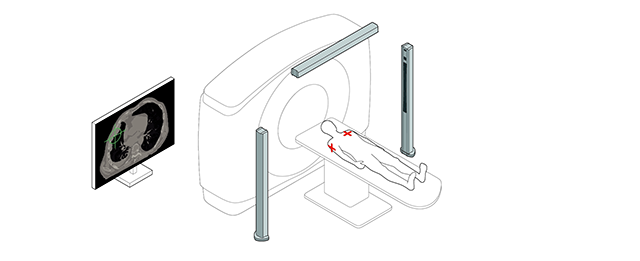
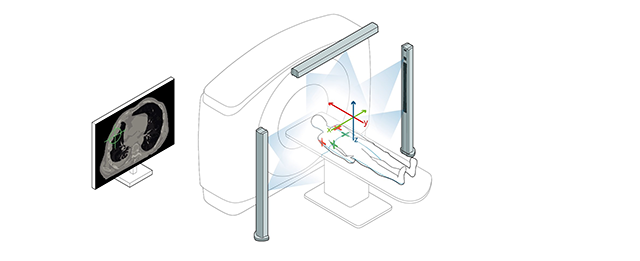
Save precious time at the linear accelerator (LINAC) and prepare your patients in the best possible way at CT/PET-CT. Lasers at CT help project coordinates onto the patient's surface that are defined as a reference between the patient's internal and external anatomy. In this way the DORADO laser system enables precise registration of CT and MRI data and links imaging with planning and treatment as required by the report of AAPM Task Group 66.
The DORADO laser system is available with the laser color red. You have the choice of whether only one (one plane) or three laser lines (2 planes) can be moved. Fine adjustment of the laser lines can be done manually by means of adjusting screws. The control software CARINAnav will be delivered pre-installed on a tablet or desktop PC.
Lay the foundation for reproducible positioning of your patients throughout the entire treatment with DORADO.
Q&A
How long is the laser line?
The length of the laser line is equal to the distance between laser source and patient. Therefore, for example, the laser line is only one meter long at a distance of one meter, but 4 meters long at a distance of 4 meters.
How can LAP ensure projection precision?
The projection precision is influenced by the straightness of the rail and the temperature. During production, the projection accuracy of each rail is checked twice and documented in the Delivery Report. If it is not within the tolerance, the rail is not used. Only laser devices that pass these stringent checks will be used.
Do I get a quality report?
Yes, during production a Delivery Report with all the quality parameters is created for each laser system, which is handed over to our customers after installation.